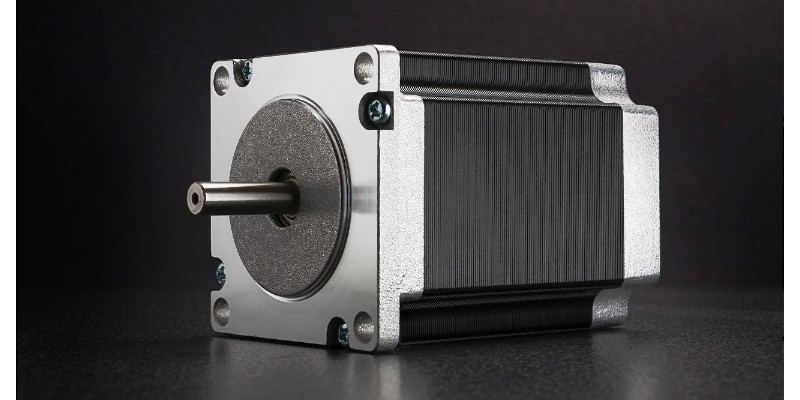
電子工作「ステッピングモーターの動作原理」のご紹介
ご訪問ありがとうございます。
今回は、電子工作「ステッピングモーターの動作原理」をご紹介します。
「ステッピングモーター」について
ステッピングモーターを回転させるには、単純な電圧や電流の制御ではなく、複数の巻線(コイル)に順番に電流を流すという操作が必要です。今回はステッピングモーターの動作原理をご紹介します。
「ステッピングモーターの特徴」について
一般的なモーターは、電源から直流や交流の電流を与えると、連続的に回転します。このときの回転速度は与える電力、負荷の大きさ、交流モーターなら周波数などによって決まります。
正確な制御が行える「サーボモーター」
正確な回転量や回転速度を実現したい場合は、
- モーターの軸や負荷装置の側に回転量や速度を調べるセンサーを装着し、
- センサーから得られた情報に基づいてモーターを制御する必要があります。
このような制御を行うモーターをサーボモーターといいます。
簡単な構成で制御できる「ステッピングモーター」
サーボモーターはセンサーや制御回路など、複雑な構成になりますが、もっと簡単な構成で指定した速度、回転量で運転できるモーターがあります。それがステッピングモーターです。
シンプルで安価な「ステッピングモーター」
ステッピングモーターは、いくつかある巻線に順に電流を流すことで、モーター軸が一定の角度ずつ回転していくというものです。
制御は一般的なモーターより複雑になりますが、マイコンなどのデジタル回路での制御が容易で、サーボモーターよりは単純で安価に済むという特徴があります。
「ステッピングモーターの仕組み」
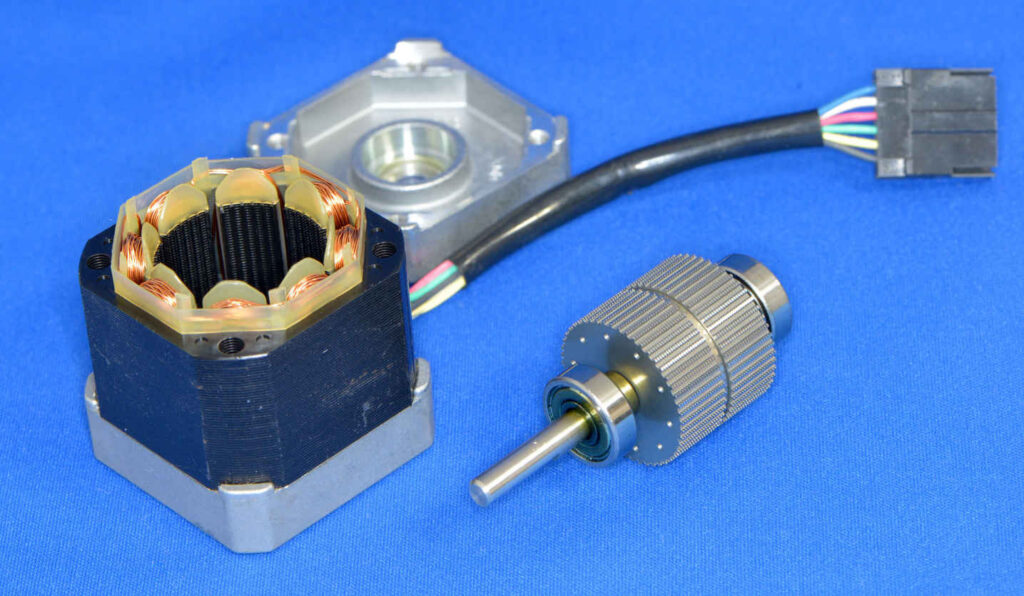
一般的なステッピングモーターは、界磁側の2組の固定巻線により磁力を発生し、回転子に回転する力を作用させます。回転子には電流を流す巻線はなく、鉄やマグネットで構成されています。
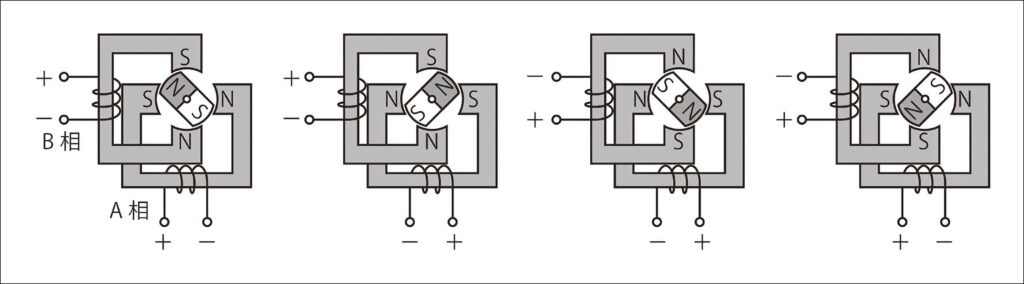
ステッピングモーターを単純化した構造が下図です。A相巻線とB相巻線に流す電流を規則的に変化させていくことで、マグネットで構成された回転子の角度が変化していきます。
ステッピングモーターの原理:1相励磁方式
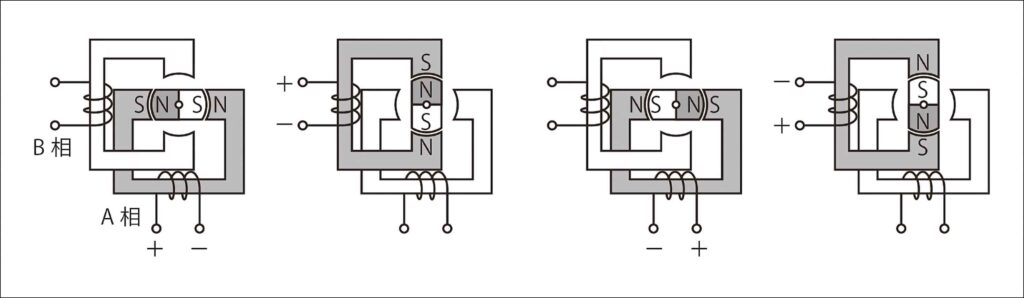
実際のステッピングモーターはこんなに単純な構造ではなく、回転子側、固定巻線側の磁極の形状を工夫することで、励磁ごとに進む角度がもっと小さくなります。
ステッピングモーターの内部
「バイポーラタイプとユニポーラタイプ」
ステッピングモーターは各巻線に電流を流して磁界を発生させますが、その構造上、それぞれの巻線の磁界の向きを反転できなければなりません。巻線は電磁石として機能するので、磁界の反転は、巻線に流す電流の向きを逆にします。

バイポーラ形
ユニポーラ形
巻線の中間から線を引き出し、3端子としたものです。中間の端子をコモンといいます。電源のプラス側をコモンに接続し、両端のうちのどちらかにマイナスを接続すると、コモンとその端子の間に電流が流れ、磁界が発生します。
両端のどちらに接続するかに応じて巻線に流れる電流の向きが逆になり、磁界の向きを反転できます。
バイポーラ形のメリットとデメリット
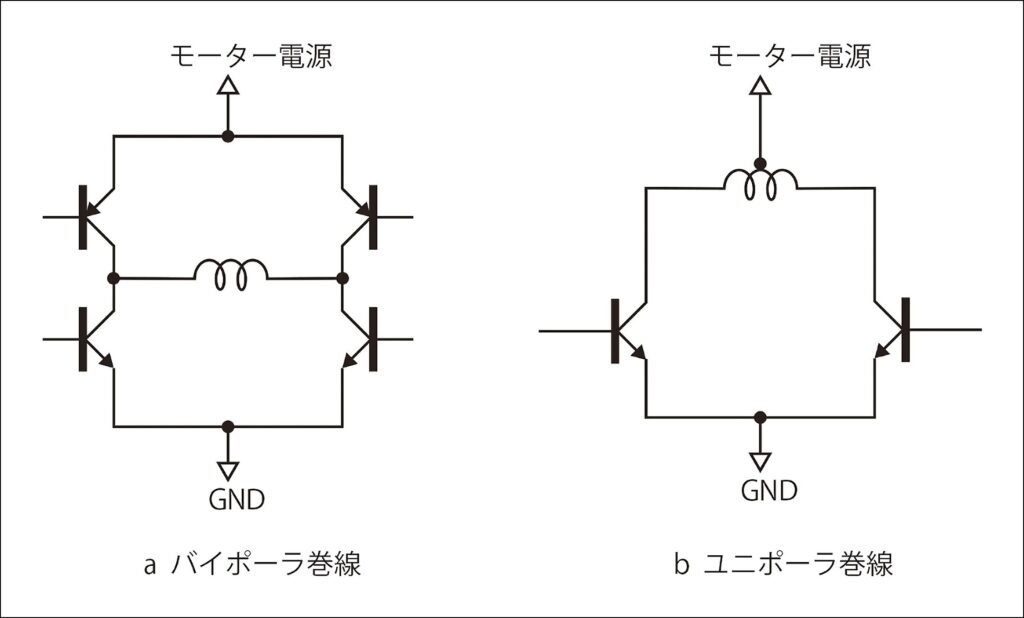
原理の面で単純なのはバイポーラ形ですが、トランジスタを使って駆動回路を組み立てる場合、回路が複雑になるという欠点があります。
巻線に流す電流を反転させるために、図(a)に示すようにHブリッジ回路構成にしなければならず、パワートランジスタが4個必要になり、また電源のプラス側のトランジスタ(ハイサイド)を制御するための回路が複雑になります。
ドライバ回路
ユニポーラ形のメリットとデメリット
ユニポーラ形は、常に巻線の半分にしか電流を流さないので効率が悪いという欠点がありますが、駆動回路が単純になるという特長があります。
図(b)のように単純なOn/Off回路を2組用意し、中央のコモン端子を電源のプラスに接続し、両端の端子にトランジスタを置いてグラウンドへのスイッチングを行います。この構成はパワートランジスタ2個で済み、ハイサイド側の回路は不要です。
モーター制御を簡単にしてくれる「ドライバ回路」
モータードライバを個別のパワートランジスタなどを使って自分で組み立てる場合は、このドライバ構成の差は大きな要素ですが、ドライバICだけでまかなえる小型モーターなら、面倒な回路の大半がICに組み込まれているので、バイポーラ型の複雑さという点はさほど問題になりません。
「励磁(れいじ)の制御」について
ステッピングモーターを回転させるには、2組の巻線に流す電流の極性とタイミングを制御します。この制御にはいくつかのやり方があります。
1相励磁
前の説明では、2組の巻線のうちの1組だけを励磁するという操作を規則的に繰り返し、回転子を90度ずつ回転させるというものでした。これを1相励磁といいます。
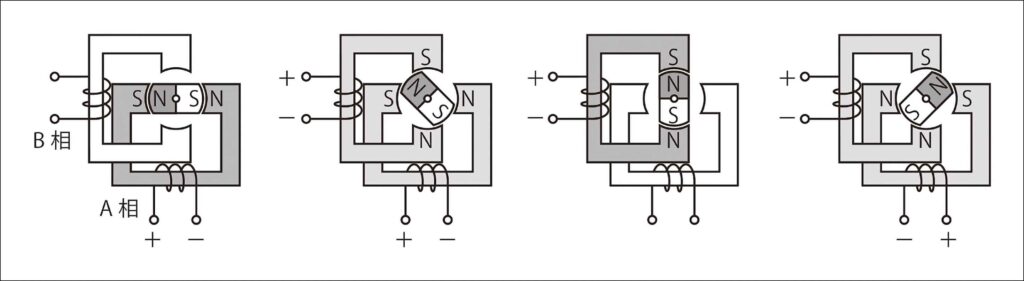
2相励磁
常に2組の巻線に電流を流す方法です。回転子の磁極は固定子の磁極の中間に位置するようになります。
2相励磁
2組の巻線を同時に使うことで磁力が強くなり、モーターのトルクが大きくなります。1相励磁の場合は、角度が45度だけ変化しますが、1ステップで進む角度は90度のままです。
1‐2相励磁
1相励磁と2相励磁を組み合わせることで、回転子の止まる位置が45度きざみになります。
1-2相励磁
つまりステップ角度が半分になります。単純にこの制御を行うと、1相だけ励磁するときと2相とも励磁するときとで磁力の大きさが変わり、トルクが変動してしまいます。これを避けるためには、2相とも励磁する際には励磁電流を減らしてバランスを取ります。
「マイクロステップ制御」について
1-2相励磁は、2組のコイルの電流を両方流す、片方だけ流すという切り替えを行うことで、回転子の極を中間に位置させてステップ間隔を半分にしました。
細かく制御が可能な1-2相励磁
1-2相励磁は、両方の巻線に電流を流す際に、電流量を減らすことで、1相励磁のときと同等の磁力としますが、これをさらに細かく制御して、ステップ間隔をより小さくすることができます。
1-2相励磁では最大電流、その1/2、0というように3通りですが、1/4段階ごとにすれば5通りの電流量になります。2組の巻線の電流量のバランスを変えることで、回転子の角度はそれぞれの電流量による磁力の差がバランスする位置になります。
このような励磁方法をマイクロステップ制御といいます。
マイクロステップ制御
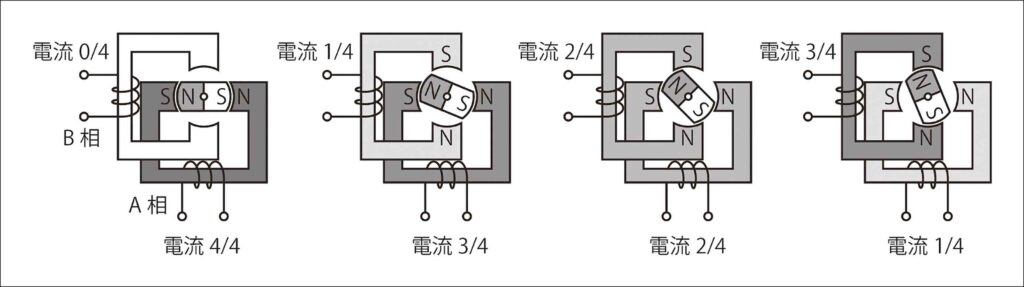
前述の1-2相励磁は、もっとも単純なマイクロステップ制御ということになります。マイクロステップ制御でステップ角度が小さくなり、モーターをより滑らかに回転させることができます。特に低速回転時に断続的な動きを解消でき、騒音や振動を小さくできます。
マイクロステップ制御を行うためには、巻線に流す電流を変化させなければならないため、制御回路が複雑になります。一般に電流制御はPWMで行います。
自分でこの回路を作ったりプログラムを書いたりするのは大変ですが、ステッピングモータードライバICにはマイクロステップ制御をサポートした製品も多くあるので簡単に実現できます。
マイクロステップ制御をサポートしている「L6470」
低速回転時に有効な「マイクロステップ制御」
マイクロステップ制御は低速回転時には有効な機能ですが、高速回転時にはあまり意味がありません。回転子の慣性モーメントの影響や電磁気的な効果により、マイクロステップを使わなくても、断続的な回転ではなく連続回転になるためです。
「ステッピングモーターの特性」について
ステッピングモーターは正確に回転量を制御できます。そして大電流を流すことで大きな低速トルクを得ることができます。
また停止時にも巻線に電流を流しておけば、大きな制動トルク(外力が加わっても動かないという力)も得られます。
ステッピングモーターの苦手なこと:高速回転
しかし苦手なこともあります。その1つが高速回転です。巻線に順に電流を流すという制御を数百回行ってやっと軸が1回転するという構造上、回転を上げるには高速なスイッチング制御が必要です。
高回転でトルクが小さくなる
また回転速度が高くなると、軸トルクは小さくなります。これはモーター全般に共通する特性なのですが、モーターは回転することで発電機として動作するため、内部の巻線に逆起電力が発生します。
この電圧は外部から加えられる電圧とは逆向きなので、実質的に巻線にかかる電圧が下がり、電流が小さくなります。
ステッピングモーターの最大の欠点:脱調
ステッピングモーターの最大の欠点は脱調です。ステッピングモーターは正確に回転を制御できますが、負荷が大きすぎると、想定通りに回転できない場合があります。これを脱調といいます。
しかし用途によっては負荷が過大になることもあるので、脱調が起こる可能性がある用途では、センサーを併用する必要があります。
「ステッピングモーターの基本スペック」のご紹介
ステッピングモーターは汎用部品なので、基本的な原理や使い方を理解していれば、必要な製品を自分で探したり、あるいは用途に応じて適当なものと交換したりすることができます。
ステッピングモーターの特性を示す代表的な情報として、以下のものがあります。詳細は個々のモーターのデータシートで調べてみて下さい。
定格電圧
モーターを使用する際の電源電圧です。例えば定格12Vであれば、モーター電源電圧を12Vとします。これより低いと規定のトルクや回転数が得らません。高速回転時のトルク増強のために電圧を上げる場合は、過電流が流れないように制御しなければなりません。
相電流
定格電圧ではなく、各相に流せる最大電流を示している製品も多くあります。この場合、駆動電圧は電流を調べながら調整する必要があります。通常、停止ないし低回転時には電圧を低くし、高回転時には電圧を上げることになります。
軸トルクと回転数
一般に軸トルクは、定格電源に接続した状態、あるいは定格電流を流した状態で規定されます。前に触れたように回転数が上がるほどトルクは低下しますが、この変化の詳細、最高速度などはデータシートにグラフで示されています。
一般に軸トルクが大きいモーターほど大型になり、消費電力も大きくなります。
「電子工作/修理/メンテナンス」関連マップのご紹介
「電子工作/修理/メンテナンス」関連サイトをご紹介します。
「電子工作/修理/メンテナンス」関連マップのご紹介
「電子工作/修理/メンテナンス」関連サイトをご紹介します。
「学ぶ」学習用関連サイトマップのご紹介
「学ぶ」学習用関連サイトマップをご紹介します。
「学ぶ」学習用関連サイトマップのご紹介 |
|||
| 学び/学習TOP > IT|ゲーム作り|HP作成 | |||
| 【IT】エディタ/正規表現|プログラミング| 【ゲーム作り】STG作り方|C言語の入門/基礎|リファレンス/サンプル文 【HP作成】WordPress|Cocoon|便利テクニック |
|||
■■│コペンギンTOP > ゲーム│ホビー│書籍・マンガ│■■ |
シューティングゲーム | ゲーム | 中古・新品通販の駿河屋
「学ぶ」学習用関連ページのご紹介
「学ぶ」学習用関連ページをご紹介
コペンギン・サイトマップ
コペンギンのサイトマップをご紹介します。
| 【コペンギンTOP】サイトマップ | ||||
| コペンギンTOP > ゲーム│ホビー│書籍・マンガ│ | ||||
■■│コペンギンTOP > ゲーム│ホビー│書籍・マンガ│■■ |
||||
| サイトマップ一覧 |

懐かしの名作から最新作までの豊富な品揃え!通販ショップの駿河屋
コペンギンサイトマップ関連ページのご紹介
コペンギン関連ページをご紹介します。
【ゲームTOP】ゲーム関連ページのご紹介

【書籍・雑誌TOP】書籍・雑誌サイトマップ関連ページのご紹介

【ホビーTOP】ホビーサイトマップ関連ページのご紹介
